三菱総合研究所ら4社、標準化に取り組んできた無人航空機の衝突回避システムのISO認定を発表。国際規格「ISO15964」が発行
NEDOの委託事業「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」(以下、NEDO DRESSプロジェクト)での成果をもとに、日本無線株式会社(以下、日本無線)、日本アビオニクス株式会社(以下、日本アビオニクス社)、株式会社ACSL(以下、ACSL社)、株式会社三菱総合研究所(以下、三菱総合研究所)の4社は、無人航空機の衝突回避システムの標準化に取り組み、そのシステムがISO認定されたことを公開した。
目次
標準化に向けて取り組まれてきた無人航空機の衝突回避システムのISO認定について
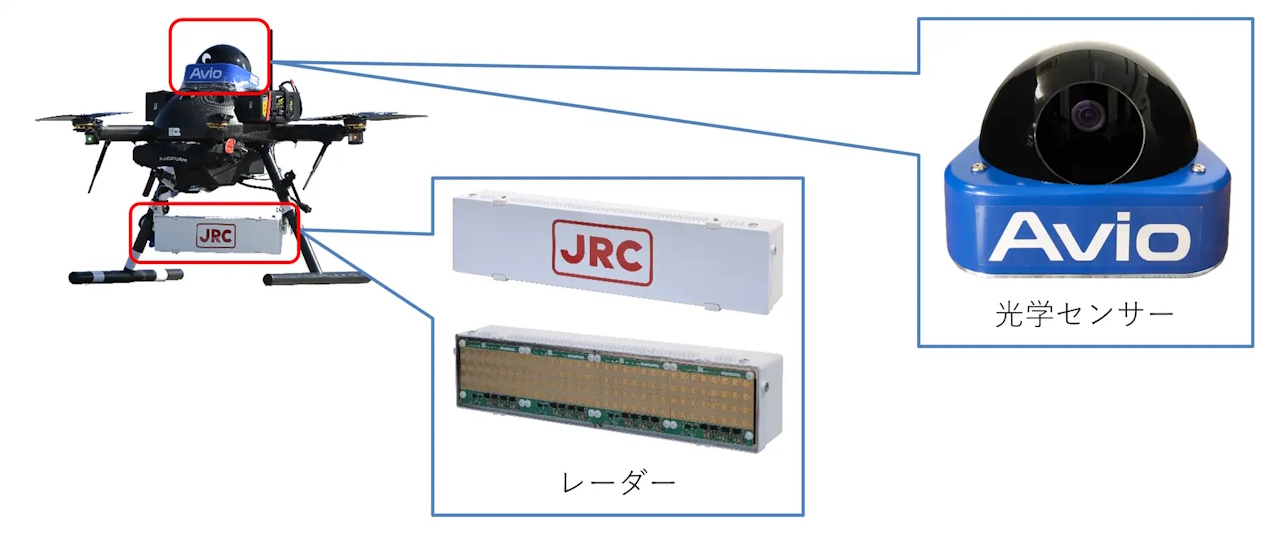
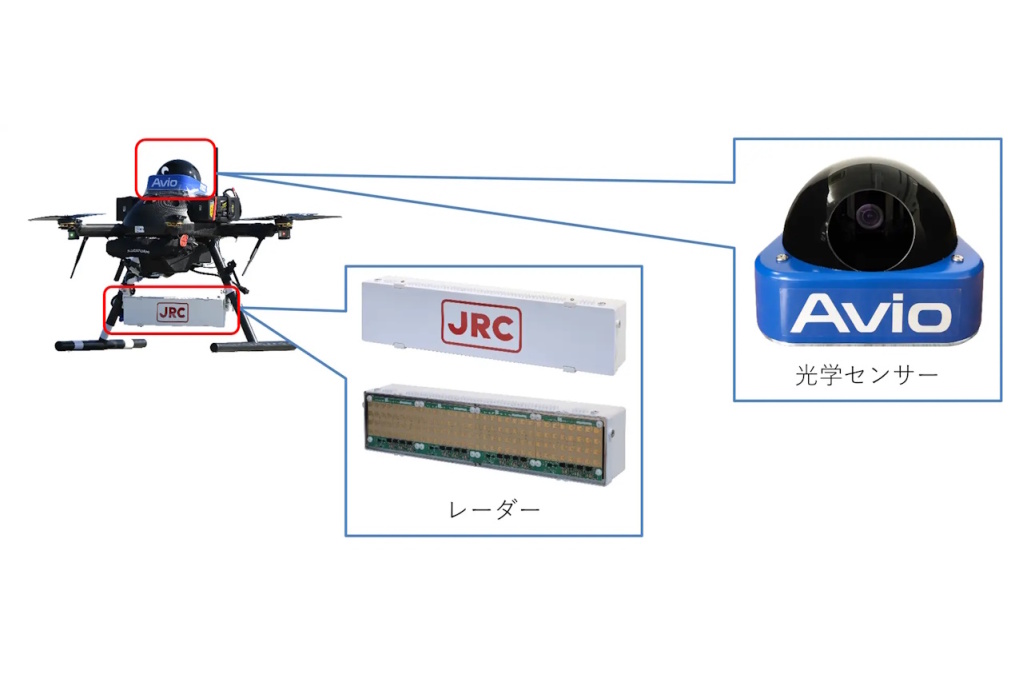
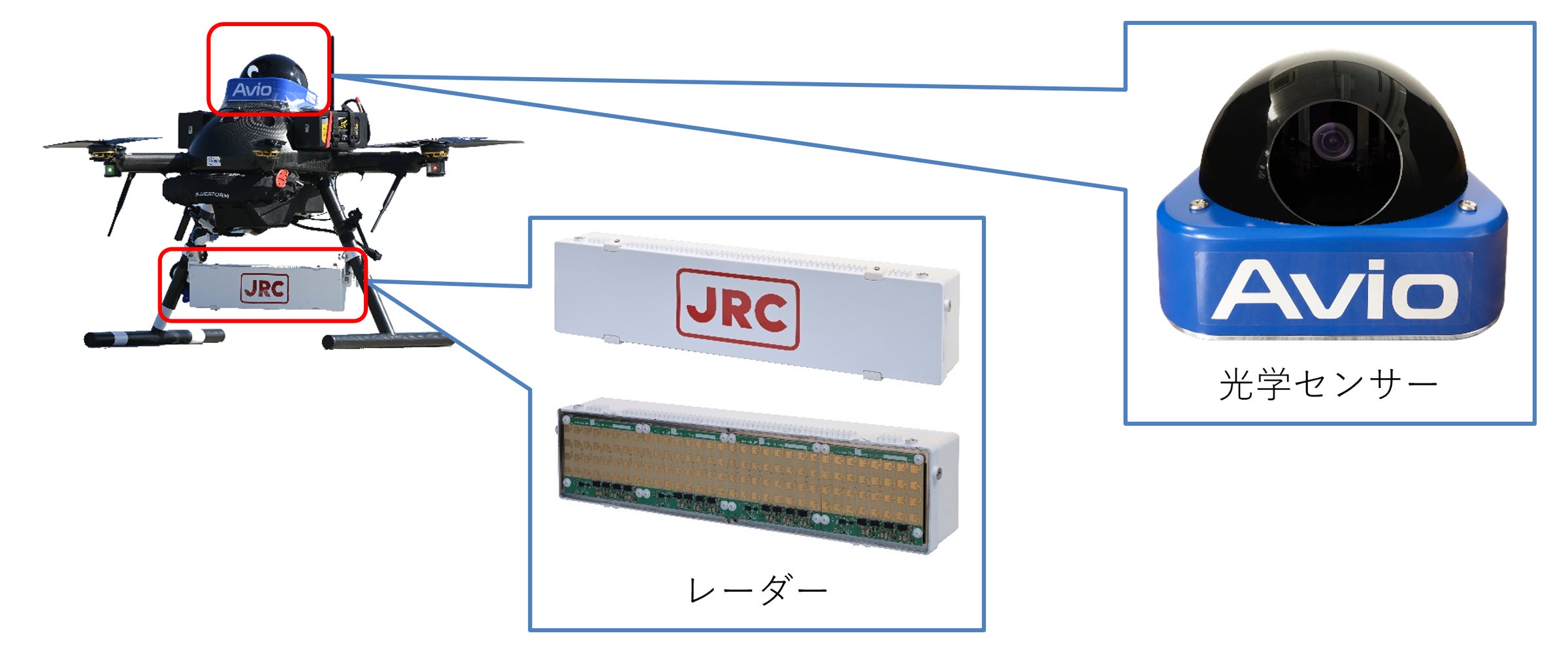
NEDO DRESSプロジェクトで開発したセンサーの例
2025年4月25日に、無人航空機の衝突回避システムに関する国際規格が、国際標準化機構(ISO)より正式に発行された『ISO15964 Detection and avoidance systems for uncrewed aircraft systems』」(以下、当規格)。
当規格は、「ISO21384-3 Unmanned aircraft systems―Part3: Operational procedures」(無人航空機システム―第3部 運航手順)を具現化するための衝突回避システムに使用されるセンサーなどの要件を規定している。
日本からは、NEDO DRESSプロジェクトで行われた多種多様な実証実験成果を取りまとめた技術報告書「ISO/TR 23267:Experiment results on test methods for detection and avoidance (DAA) systems for unmanned aircraft systems」を根拠として、有人ヘリコプターとの衝突回避などを想定したユースケースを盛り込んだものとなっている。
今後、ドローンに関わるステークホルダーが、個別に進めてきた無人航空機の衝突回避技術の開発や運用実証、事業化検討などを本規格に基づいて行うことで、グローバルな情報共有や技術開発、社会実装の加速が見込まれる。
今回、無人航空機と他の航空機、あるいは無人航空機同士の衝突回避システムが国際標準化されたことで、技術開発の方向性を統一することが可能になるとともに、社会実装に向けた各国の取り組みが加速し、幅広いサービスの実現につながることが期待される。
背景
一般的にドローンと呼ばれる小型から中型の無人航空機は、既に農業分野などで利用が広がっている。
さらには災害時の物資運搬や遭難者捜索、物流インフラなどの用途での活用に、大きな期待が寄せられている。
一方で、無人航空機とドクターヘリなど有人航空機とのニアミス実例も国内で報告されるなど、他の航空機との衝突をどのように回避するかが無人航空機の安全利用における喫緊の課題となっている。
NEDO DRESSプロジェクトでは、2017年度から無人航空機の衝突回避技術の開発を開始し、2021年度までに実証実験を重ねてくることで、衝突回避技術に関する複数の研究開発成果を公開されてきた。
この成果をもとにした日本発の提案により、2023年10月に無人航空機の運航手順の規格である「ISO 21384-3:2023 Unmanned aircraft systems Part 3:Operational procedures」(以下、ISO 21384-3:2023)に衝突回避CONOPS (Concept of Operations:運用構想)が新たな章として追加され、6ステップからなる基本的な衝突回避手順が規定された。
2024年4月15日には、技術報告書ISO/TR 23267が公開されている。
NEDO DRESSプロジェクトの成果
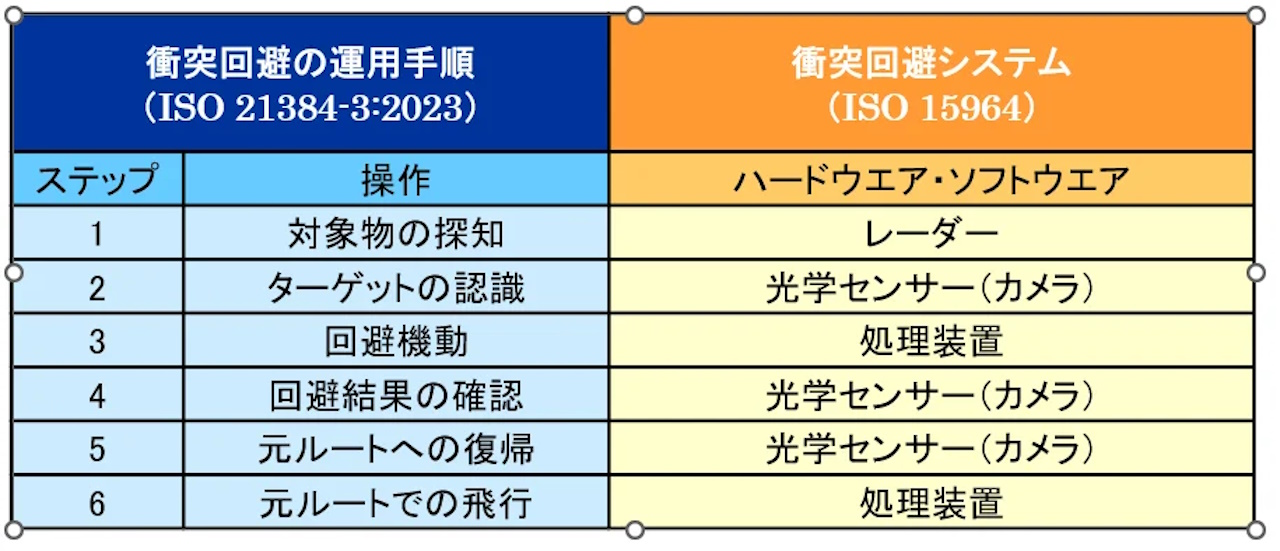
表1 衝突回避6ステップで使用されるハードウエア・ソフトウエア
当規格ISO 15964は、ISO 21384-3:2023で規定された「対象物の探知」、「ターゲットの認識」、「回避機動」、「回避結果の確認」、「元ルートへの復帰」および「元ルートでの飛行」の6ステップからなる基本的な衝突回避手順を具現化する衝突回避システムの基本アーキテクチャが規定されている。
さらに、本規格は短距離衝突回避システム、中長距離衝突回避システムなど、アプリケーションに応じた構成となっており、日本からは有人航空機などとの衝突回避を想定した中長距離のユースケースへの対応が盛り込まれている。
具体的には、無人航空機に搭載されるレーダーと光学センサーを備える衝突回避システムについて衝突回避CONOPSの6ステップにおける各種センサー機器の役割や探知・認識距離などが規定された内容となっている。
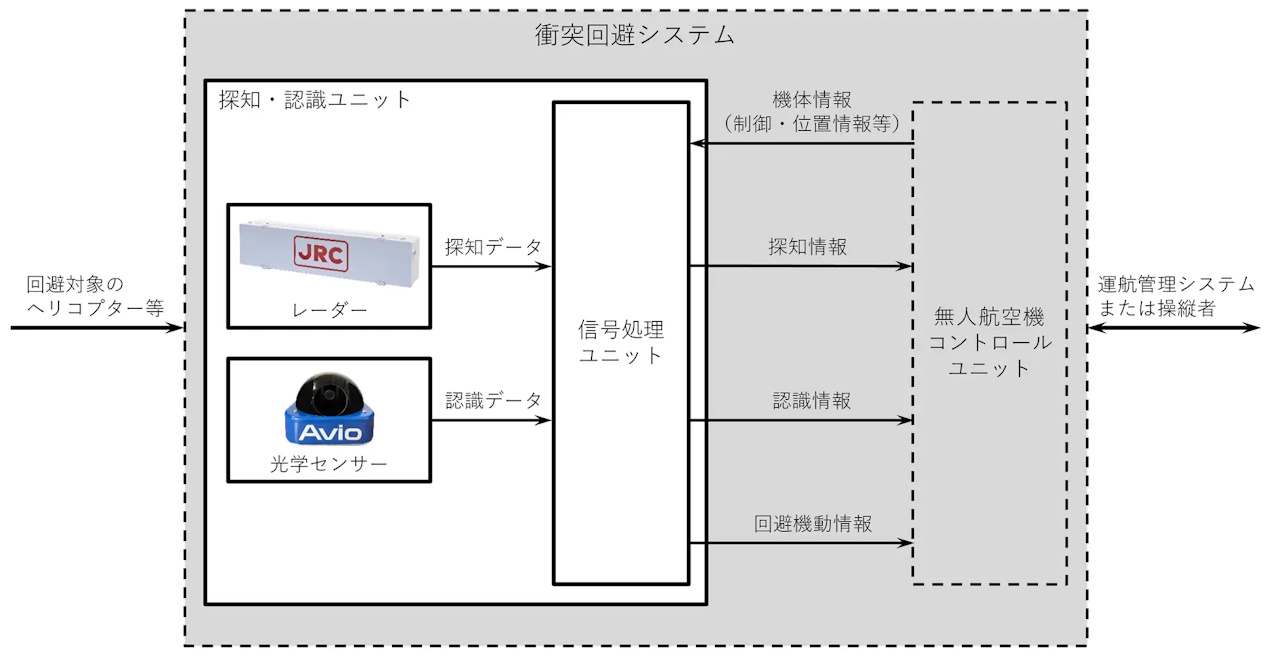
図2 中長距離衝突回避システムの基本アーキテクチャ
各種センサー機器の役割や探知・認識距離についての要求事項は、日本無線と三菱総合研究所がNEDO DRESSプロジェクトで実施してきた実証実験などを研究開発成果として取りまとめており、日本発として提案したISO/TR 23267がその根拠と位置付けられている。
また、レーダーを搭載できない小型の無人航空機におけるユースケースへの対応として、光学センサーのみをセンサーとして使用するアーキテクチャについても規定。
ISO/TR 23267の根拠をもとに衝突回避CONOPSの6ステップにおける各種センサー機器の役割や探知・認識距離などについて規定されている。
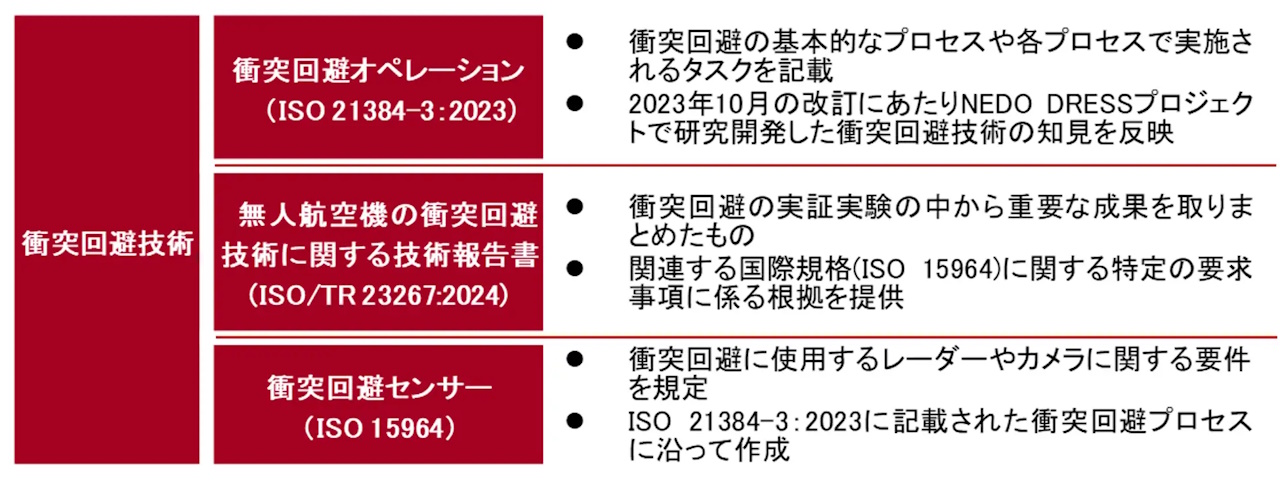
表2 NEDO DRESSプロジェクトの成果のISO規格への反映
2023年度成果報告書
情報収集費/NEDOにおける標準の戦略的活用に資する事例等調査をもとに日本無線が作成。
資料詳細はこちら。
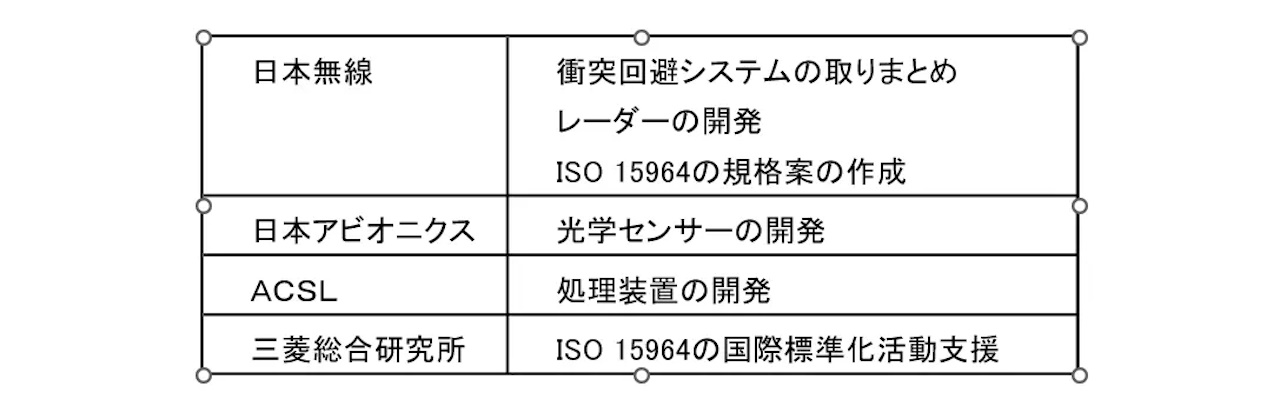
各社の役割分担
成果の社会への波及
衝突回避手順の技術運用の標準化を受け、根拠となる文書をもとにそれを具現化するシステムの標準化も行われた現在、規制当局の法制化が加速し、さらなる空の安全確保が図られ、より広範な用途においてドローンが活躍する省エネルギー社会の実現が期待される。
ーーーーーー
出典
関連記事

KDDIスマートドローン社、北海道新十津川町役場にドローンポートを常設。クマ出没時の遠隔監視運用を開始
KDDIスマートドローン株式会社(本社:東京都千代田区、代表取締役社長:博野 雅文)(以下、KDDIスマートドローン社)は、北海道新十津川町(町長:谷口 秀樹)(以下、新十津川町)の新十津川町役場の屋上にドローンポート『Skydio Dock for X10』を常設し、運用を開始した。

JR西日本とTRIPLE7社、北陸新幹線区間における大型物流ドローンを活用した資機材搬送実証実験を実施
株式会社TRIPLE7(本社:東京都渋谷区)(以下、TRIPLE7社)と西日本旅客鉄道株式会社(本社:大阪府大阪市北区)、ジェイアール西日本商事株式会社(本社:大阪府吹田市)は、2025年12月19日、北陸新幹線(越前たけふ〜敦賀)区間において、大型物流ドローンを活用した資機材搬送の実証実験を連携して実施した。

テレビ朝日とKDDIスマートドローン社、災害報道への活用に向けてドローンポートを用いた実証を開始
株式会社テレビ朝日(本社:東京都港区、代表取締役社長:西 新)(以下、テレビ朝日)とDDIスマートドローン株式会社(本社:東京都千代田区、代表取締役社長:博野 雅文)(以下、KDDIスマートドローン社)は、ドローンポートを活用した遠隔操作による災害報道の実現に向けた取り組みを開始することを発表した。 本取り組みを通じて得られた知見をもとに、今後は石川県能登半島全域、さらには全国へ配備が進むドローンポートを活用した広域的な災害報道ネットワークの構築を目指していくとしている。

「紙ドローン」を全国の教育現場へ。CAMPFIREで目標金額303%を達成し、「クラフトドローンコミュニティ」を正式スタート
韓国発の<紙>ドローン「COCODRONE(ココドローン)」の日本総代理店である株式会社Binarity Bridge(本社:大阪市北区 代表取締役:金陽信)(以下、Binarity Bridge社)は、日本全国における<紙>ドローンのワークショップの実施を目指し、ドローンスクール・プログラミング教室・美術教室などを対象としたパートナーおよびアンバサダーを募る「クラフトドローンコミュニティー」を開始した。
人が巡回する時代から「ドローン×AI」の時代へ。日本ドローンビジネスサポート協会、ドローン自動監視サービス開始
一般社団法人日本ドローンビジネスサポート協会(所在地:岡山県、代表理事:森本宏治)(以下、日本ドローンビジネスサポート協会)は、DJI Dock3およびDJI FlightHub 2を活用した「ドローン自動監視サービス」を開始した。 本サービスは、太陽光発電施設における窃盗被害対策や、自治体向けの不法投棄監視など、広範囲の監視業務を無人化・自動化し、安心・安全な地域社会の実現へ貢献していくとしている。