
屋内でのドローンの自己位置推定における課題解決への手法提案。Journal of Digital Life に大阪電気通信大・中原准教授らが論文発表
屋内でのドローンの自己位置推定における課題解決に向けて、新たな手法で行った実証実験についての研究論文を、大阪電気通信大学の中原匡哉准教授らが発表した。
目次
屋内でのドローンの自己位置推定における課題解決への手法提案について
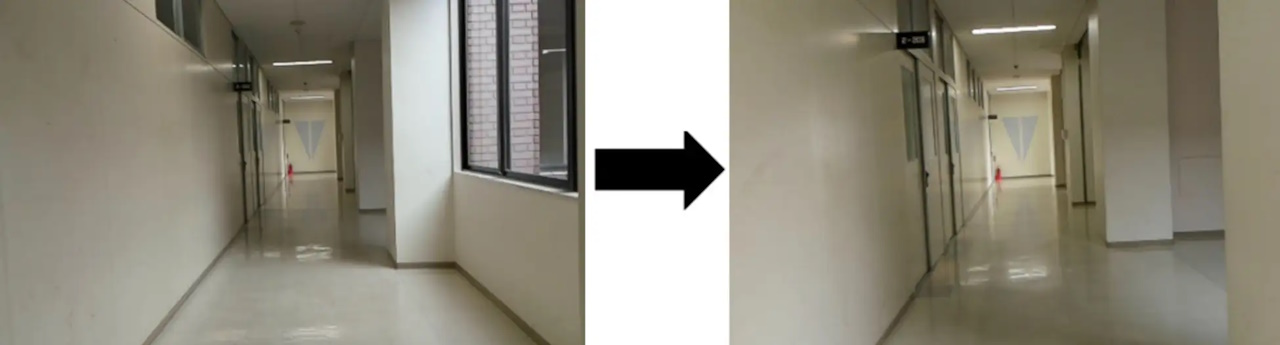
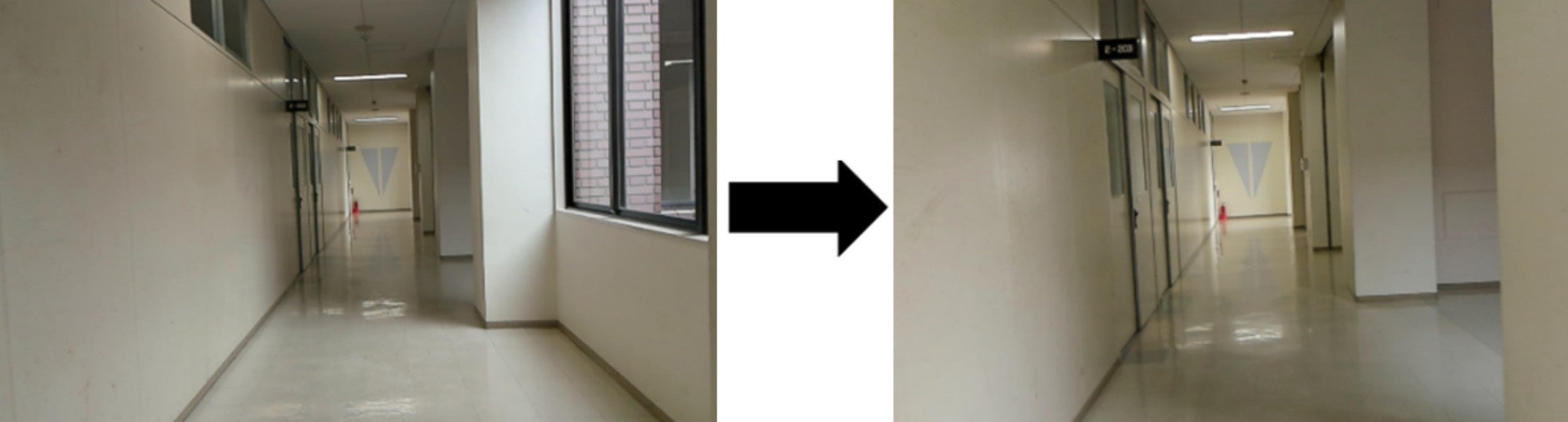
推定に失敗しやすい直進区間の例
本論文は、株式会社産経デジタルが運営する日本発の国際学術論文ジャーナル「Journal of Digital Life」に掲載されている。
掲載されている本論文はこちら
※日本語による解説記事
「ドローン、室内での自己位置推定の課題点解決へ 大阪電気通信大・中原匡哉准教授ら実証実験」
背景
人材不足が社会問題となっている今日、警備業界においても就労者の確保が困難になりつつある。
対応策として、防犯カメラやドローンを用いた警備システムの開発が求められているが、課題点も多い。
例えば、警備用ドローンによる自動巡視では、屋内の無地の壁面などが多い場合、得られる特徴量が少ないため自己位置の推定に失敗しやすいといった問題がある。
実証実験について
研究チームは、それまでの特徴点ベースの手法を組み合わせつつ、物体の移動などによって生じる環境変化に対応可能な手法を提案、実証実験を行った。
その結果、ドローンが巡回経路上の位置を概ね推定できていることが明らかになり、今回提案した自己位置推定技術が、これまでの課題の解決につながる精度を示した。
研究チームは「今後は、ガンマ補正などによる明るさ補正や、深層学習を用いた疑似的に明るい場所で撮影したかのような画像を生成することにより、光量の変化の影響を受けにくい手法へと改良する必要がある」とし、照明のついていない夜間でも適用が可能な同技術の開発を目指していく方針を掲げている。
ーーーーーー
出典
関連記事

KDDIスマートドローン社、北海道新十津川町役場にドローンポートを常設。クマ出没時の遠隔監視運用を開始
KDDIスマートドローン株式会社(本社:東京都千代田区、代表取締役社長:博野 雅文)(以下、KDDIスマートドローン社)は、北海道新十津川町(町長:谷口 秀樹)(以下、新十津川町)の新十津川町役場の屋上にドローンポート『Skydio Dock for X10』を常設し、運用を開始した。

JR西日本とTRIPLE7社、北陸新幹線区間における大型物流ドローンを活用した資機材搬送実証実験を実施
株式会社TRIPLE7(本社:東京都渋谷区)(以下、TRIPLE7社)と西日本旅客鉄道株式会社(本社:大阪府大阪市北区)、ジェイアール西日本商事株式会社(本社:大阪府吹田市)は、2025年12月19日、北陸新幹線(越前たけふ〜敦賀)区間において、大型物流ドローンを活用した資機材搬送の実証実験を連携して実施した。

テレビ朝日とKDDIスマートドローン社、災害報道への活用に向けてドローンポートを用いた実証を開始
株式会社テレビ朝日(本社:東京都港区、代表取締役社長:西 新)(以下、テレビ朝日)とDDIスマートドローン株式会社(本社:東京都千代田区、代表取締役社長:博野 雅文)(以下、KDDIスマートドローン社)は、ドローンポートを活用した遠隔操作による災害報道の実現に向けた取り組みを開始することを発表した。 本取り組みを通じて得られた知見をもとに、今後は石川県能登半島全域、さらには全国へ配備が進むドローンポートを活用した広域的な災害報道ネットワークの構築を目指していくとしている。

「紙ドローン」を全国の教育現場へ。CAMPFIREで目標金額303%を達成し、「クラフトドローンコミュニティ」を正式スタート
韓国発の<紙>ドローン「COCODRONE(ココドローン)」の日本総代理店である株式会社Binarity Bridge(本社:大阪市北区 代表取締役:金陽信)(以下、Binarity Bridge社)は、日本全国における<紙>ドローンのワークショップの実施を目指し、ドローンスクール・プログラミング教室・美術教室などを対象としたパートナーおよびアンバサダーを募る「クラフトドローンコミュニティー」を開始した。
人が巡回する時代から「ドローン×AI」の時代へ。日本ドローンビジネスサポート協会、ドローン自動監視サービス開始
一般社団法人日本ドローンビジネスサポート協会(所在地:岡山県、代表理事:森本宏治)(以下、日本ドローンビジネスサポート協会)は、DJI Dock3およびDJI FlightHub 2を活用した「ドローン自動監視サービス」を開始した。 本サービスは、太陽光発電施設における窃盗被害対策や、自治体向けの不法投棄監視など、広範囲の監視業務を無人化・自動化し、安心・安全な地域社会の実現へ貢献していくとしている。