
再生二期作にも対応!省力化稲作のための『収穫ロボット』などをテムザック社が発表
株式会社テムザック(本店:京都府京都市、代表取締役社長:川久保 勇次)(以下、テムザック社)は、中山間農地における稲作を省力化するためのロボットとして、新たに『収穫ロボット』『多用途ロボット』を開発。 このロボットは、令和7年度『地域社会DX推進パッケージ事業』等の総務省事業の中でも活用されている。
目次
テムザック社による収穫ロボット・多用途ロボットとは?

収穫ロボット『RMD-0』
収穫ロボット『RMD-0』は、小型・電動・非搭乗で軽トラックに積載可能なサイズおよび重量。
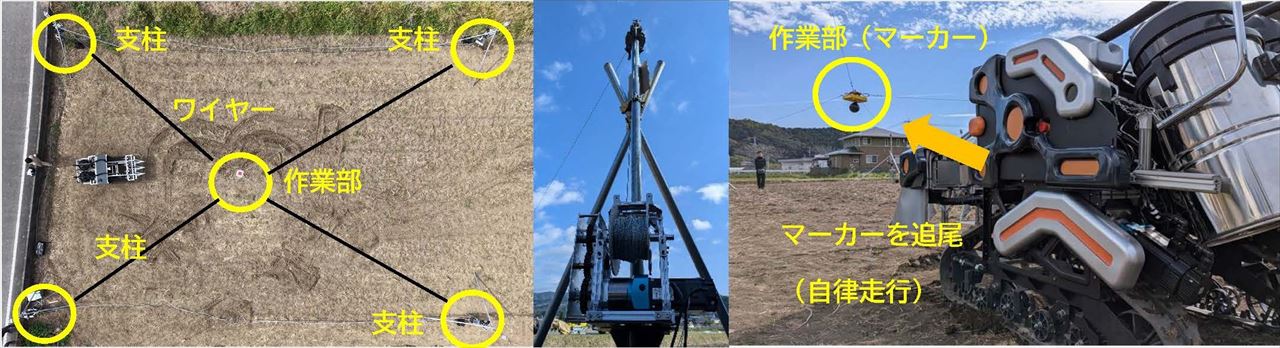
別途開発した多用途ロボットのマーカーを追尾することで自律走行することが可能となっている。
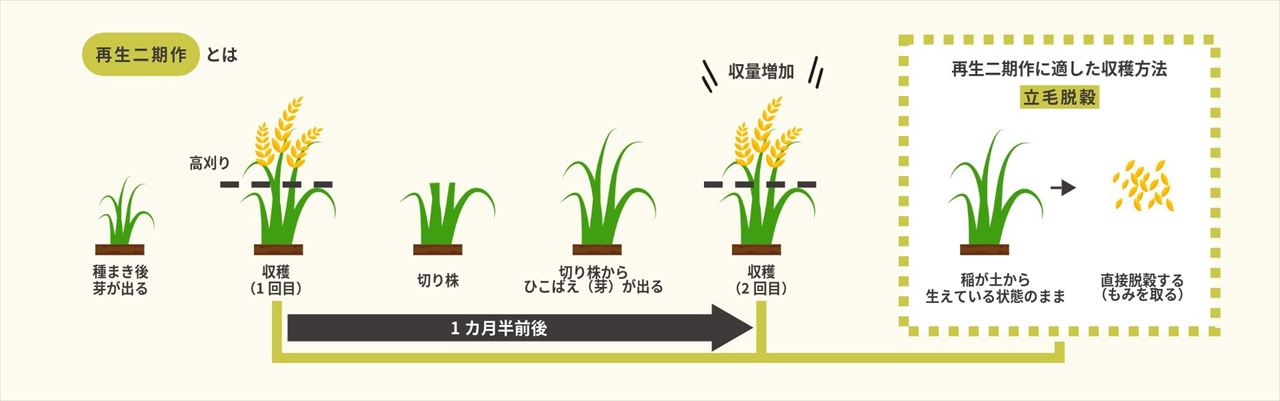
収穫機構は、1シーズンに収穫を2度行う再生二期作への対応として、高刈りおよび立毛脱穀を行うことができる構造を採用している。

多用途ロボット『MU-0』
多用途ロボット『MU-0』は、圃場の4隅から張り出しているワイヤーが伸縮し交点部の装置を移動させることで、圃場内での作業を実施・支援するもの。
具体的には、今回は他のロボットの自律移動を支援するマーカー機能と、害獣を追払う機能が搭載されている。今後は搭載する装置を拡充し、ドローン活用では課題がある作業を解決する、定置型の作業基盤としての活用をめざしている。

2025年11月18日 宮崎県延岡市にて撮影
同時に、省力化稲作支援サービスの実証プロジェクトを、総務省事業に採択されて取り組んでいるとのこと。
このプロジェクトでは、ロボット遠隔管制センター、先進無線技術の活用による映像伝送環境、AIによる圃場内リスクの自動検知などの機能を開発し、省力化稲作を総合的に実証検証中だ。今回発表したロボットは、本プロジェクトの実証実験においても活用されている。
収穫ロボット“RMD-0”の特長

小型・電動
軽トラックに積載可能なサイズで、特別な資格や技能なしに運搬が可能。電動化により静音および環境に配慮。
非搭乗・自律走行
収穫作業は開始指示のみで自動化(リモコンによる遠隔操縦も可能)。農業経験が浅い人の利用しやすさをめざす。
再生二期作対応(高刈り、立毛脱穀)
1回目の収穫後に改めて田植えや種まきをすることなく、刈り取り状態の圃場を管理して2回目の収穫を行う再生二期作。
概ね1回目の収穫から1カ月半前後に、2回目の収穫を実施。
2回目の収量向上に有効とされる高刈り(50cm程度)を実現。また生育(立毛)状態で直接脱穀することで省力化。
多用途ロボット“MU-0”の特長
ワイヤーアクションによる浮遊式移動システム
夜間の騒音や圃場地表面接近時の風の発生、稼働時の保安要員配置を気にすることなく利用できるシステム。
他のロボットの移動支援
交点部に搭載されたマーカーを自律移動させることで、収穫ロボットなどがマーカーを追尾し圃場内を自律移動。
数多くの作業を追加可能
害獣追払いのほか、生育状況センシングや遠隔圃場モニタリングなどの機能を追加することで、圃場見回り頻度を抑制。
省力化稲作支援サービス多用途ロボット『MU-0』の特長

※省力化稲作支援サービスは、株式会社インターネットイニシアティブ、株式会社パルシベイト、株式会社コヤワタオフィスおよび当社がコンソーシアムを形成し、総務省事業(令和7年度『地域社会DX推進パッケージ事業』等)に採択され取り組んでいる。
当該サービスの概要については以下を参照。
先進無線の活用(Wi-Fi-Halow,Starlink)
各圃場の映像を先進的な無線技術を活用して伝送し、クラウド上でAIが圃場内のリスクを自動解析。
AIを活用した管制センター(4圃場の同時管制)
AIが検知した圃場内への人の侵入やロボットへの接近、ロボットの圃場逸脱を管制センターに通知。緊急停止などの操作が可能。
農作業マッチングシステム(今後検証予定)
農業未経験者でも、ロボットの運搬・操縦を手伝うことで地域の中山間農地維持に貢献しながら収益を獲得。
・2025年7月23日付報道発表 – 農業ロボットや無線、AI等先端技術を活用した省力化稲作支援サービスの実証プロジェクトを開始
開発の背景
テムザック社は2022年12月に宮崎県延岡市と連携協定を締結し、稲作用ロボットの開発を開始した。
現在非常に注目度が高い稲作は、大規模化やスマート農業による生産技術向上など様々な取組がなされているが、一方で圃場面積が小さかったり、変形圃場であったり、圃場へのアクセスが悪いなどの条件が多い中山間農地に向けた取り組みは少ないのが現状だ。
テムザック社は、農地や農機の大規模化というアプローチではなく、小型で扱いが容易なロボットを用いた省力化稲作のモデル作りに、ロボット開発にとどまらず挑戦している。
その実現のために、大規模農業などと比して効率や収量が低下したとしても、人の作業量を大幅に減らすことや、近隣市民等の協力によって、中山間農地の稲作を見捨てず継続できる手段の構築をめざしている。
今後の展開
今後は、開発したロボットおよび実証中のサービスの磨き上げと更なる高度化により、農地の大規模化等が図りにくい中山間農地の維持をめざした省力化稲作支援サービスの確立と、次年度以降の事業化をめざすとしている。
———
出典

関連記事

世界初となる8K360度全景ドローン『Antigravity A1』が日本に登場
Insta360の支援を受け、ドローン愛好家とエンジニアのチームによって設立されたAntigravityは、今年初めに世界中のクリエイターと冒険家たちを魅了した『Antigravity A1』を、12月18日に日本で正式販売を開始した。 これまでにない新しい空撮ストーリーテリングの時代が幕を開けるとしている。

マプリィ社、国産レーザードローン『mapryM4』を発売
株式会社マプリィ(本社:兵庫県丹波市、代表取締役:山口 圭司)(以下、マプリィ社)は、森林・林業および測量業務の効率化を支援する新型レーザードローン『mapryM4』を、2025年12月15日より発売した。

DJI社、『DJI FlyCart 100』を発表。最大80kgの積載量の実現と飛行距離・電力効率の向上にも成功し、空中配送を再定義
民生用ドローンとクリエイティブカメラの製造開発を手掛けるDJI(以下、DJI社)は、『DJI FlyCart 100(FC100)』をグローバル市場に向けて2025年12月4日に発表した。 エベレスト山での空中配送を実現し、業界のスタンダードを確立した「FlyCart 30」を基盤とし、DJIの次世代物流ドローンは、最大80kgまでの高い積載能力、より高速な充電、LiDARやパラシュート、マルチセンサー障害物回避を備えたインテリジェントな安全システムを特徴としている。 より高度な飛行運用管理のために、DJI社はDJI Delivery AppおよびDJI DeliveryHubも導入する。

全身で楽しめる新感覚オモチャ『マジック フライングボール Pro』登場!手も足も使ってリズムよくプレイできる空飛ぶボール
全身で楽しめる新感覚おもちゃ『マジック フライングボール Pro』が発売された。 従来の<浮かせて投げ合う>遊びに加え、新しくスプリング構造を搭載。 底部を手や足で軽くタッチするだけで、ボールがピョンッとジャンプして宙に舞う仕様となっている。 発売を記念して、11月20日までは期間限定セールが開催されており、通常価格6,399円のところ、特別価格3,999円+10%OFFクーポン+1%ポイント還元で購入できる。

テラドローン社、日本初となるクマよけスプレー搭載ドローンを開発・発売開始
Terra Drone株式会社(本社:東京都渋谷区、代表:徳重 徹)(以下、テラドローン社)は、クマよけスプレー搭載ドローンの開発が完了したことを発表した。 現在、クマの人身被害および出没が増加し、夜間・藪地での視認性低下、現場要員の安全確保等が課題となる中、本製品は上空から唐辛子スプレーを遠隔操作で噴射する仕組みにより、クマに接近することなく背後・側面からの全方位噴射に対応することが可能。 テラドローン社は今後、自治体を中心に本製品を展開し、住民の安全確保や現場のリスク低減のため、持続的なクマ対策の仕組みづくりに貢献していく。