
遠隔操縦者1人による、全国4地点のドローン5機体同時運航の実証に成功。NEDO・KDDI・JALが共同発表
国立研究開発法人新エネルギー・産業技術総合開発機構(以下、NEDO)、KDDI株式会社(以下、KDDI)、および日本航空株式会社(以下、JAL)は、2024年10月28日から31日にわかり1人の遠隔操縦者が全国4地点で、ドローン計5機体を同時運航する実証を実施。実証が成功に終わった事を共同で発表した。
目次
全国4地点のドローン5機を遠隔操縦者1人が同時運航
NEDOの「次世代空モビリティの社会実装に向けた実現プロジェクト(ReAMoプロジェクト)」における「ドローンの1対多運航を実現する機体・システムの要素技術開発」(以下、本事業)の一環として実施された今回の実証。
KDDIが多数機同時運航に対応した運航管理システムを開発し、JALが航空安全に関わる知見・技術を基にリスク評価を実施、オペレーションの運用手順を策定された。
ヒューマンエラー防止のため、イレギュラー発生時の音声通知や操作の支援機能を運航管理システムに追加した点が特徴となっている。
これにより、1人の操縦者が、気象条件など運航環境が異なる全国4地点で計5機体を安全かつ効率的に運航すること、運航管理システムおよび運用手順についても有効性を確認された。
一方で、機体やシステムの不具合、運航環境の変化といったイレギュラーが同時に発生した場合の課題も確認される実証となった。

1人の操縦者による5機体同時運航の様子
実証の背景
物流の2024年問題や生産年齢人口の減少に伴う労働力不足、社会インフラの老朽化、地域の過疎化や高齢化など、国内におけるさまざまな社会課題の解決に向けて、ドローンのさらなる社会実装や事業化が進められている。
実現には、限られた情報を基に的確な状況把握・判断(モニタリング)が必要となる目視外遠隔自動運航技術の確立に加え、さらなる省力化・効率化に資する多数機同時運航など高度な運航管理が求められている。
そのリスク評価と評価に応じた低減策を通じて、運航管理システムに関わる技術要件やオペレーションの運用手順を明確にしていく必要がある。
このような背景の下、NEDOは2022年度から本事業で複数ドローンの同時運航実現に向けた運用要件の策定および運航管理システムの開発に向けて、以下の研究開発項目に取り組んでいる。
①1対多運航のシステム要件およびオペレーション要件の検討
②1対多運航に対応した運航管理システム開発
③飛行実証に向けた許可承認の取得
④複数空域における複数機同時飛行を想定した飛行実証
⑤1対多運航の事業性検証
2024年度に行われた今回の実証では、飛行地点数を4地点に拡大し、1人の操縦者が遠隔操縦により、4地点で5機の同時運航を実現した。
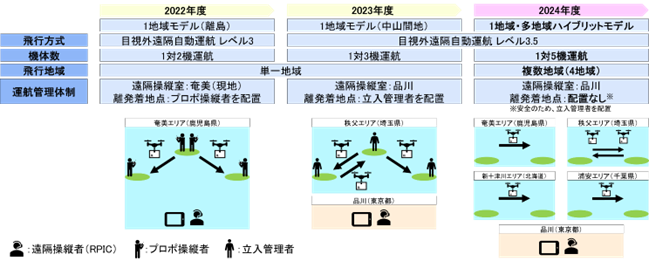
システムと運用手順の前提となる実証シナリオ
今回の実証の成果
ドローンの遠隔自動操縦では、機体の運航状況や気象状況についてモニターディスプレイを通してリアルタイムかつ精緻に監視し、必要に応じ手動操作を加える高度な運航管理が求められる。
今回の実証では、多数機(本実証では5機)の同時運航において、システムの自動化と情報集約を進め、操縦者とシステム(マン=マシン・インターフェース)の役割分担を明確化した安全管理体制を構築された。
運航管理システムには、予期しない他機接近やバッテリー残量の低下などのイレギュラー発生時に、画面上のポップアップと音声により操縦者にわかりやすく通知し、対処方法をアドバイスする機能を追加された。
これにより、イレギュラーが発生してもシステムの支援を受けて、あらかじめ定めたオペレーションマニュアルにのっとり、安全に運航を完了できることが検証された。

多数機同時運航に対応した運航管理システム(イレギュラー時の様子)
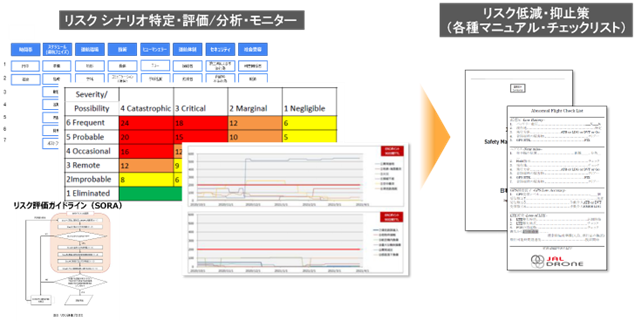
リスク評価と対応手順イメージ
今後の予定
NEDOとKDDI、JALの③社は、本実証を通じて、イレギュラー対応を含む運航管理システム・運用手順の有効性と課題を確認。
今後の体系的な要件定義においては、実証実験に加えて仮想的な環境も活用したデータの蓄積と検証を進めていくとしている。
——————
出典

関連記事

KDDIスマートドローン社、北海道新十津川町役場にドローンポートを常設。クマ出没時の遠隔監視運用を開始
KDDIスマートドローン株式会社(本社:東京都千代田区、代表取締役社長:博野 雅文)(以下、KDDIスマートドローン社)は、北海道新十津川町(町長:谷口 秀樹)(以下、新十津川町)の新十津川町役場の屋上にドローンポート『Skydio Dock for X10』を常設し、運用を開始した。

JR西日本とTRIPLE7社、北陸新幹線区間における大型物流ドローンを活用した資機材搬送実証実験を実施
株式会社TRIPLE7(本社:東京都渋谷区)(以下、TRIPLE7社)と西日本旅客鉄道株式会社(本社:大阪府大阪市北区)、ジェイアール西日本商事株式会社(本社:大阪府吹田市)は、2025年12月19日、北陸新幹線(越前たけふ〜敦賀)区間において、大型物流ドローンを活用した資機材搬送の実証実験を連携して実施した。

テレビ朝日とKDDIスマートドローン社、災害報道への活用に向けてドローンポートを用いた実証を開始
株式会社テレビ朝日(本社:東京都港区、代表取締役社長:西 新)(以下、テレビ朝日)とDDIスマートドローン株式会社(本社:東京都千代田区、代表取締役社長:博野 雅文)(以下、KDDIスマートドローン社)は、ドローンポートを活用した遠隔操作による災害報道の実現に向けた取り組みを開始することを発表した。 本取り組みを通じて得られた知見をもとに、今後は石川県能登半島全域、さらには全国へ配備が進むドローンポートを活用した広域的な災害報道ネットワークの構築を目指していくとしている。

「紙ドローン」を全国の教育現場へ。CAMPFIREで目標金額303%を達成し、「クラフトドローンコミュニティ」を正式スタート
韓国発の<紙>ドローン「COCODRONE(ココドローン)」の日本総代理店である株式会社Binarity Bridge(本社:大阪市北区 代表取締役:金陽信)(以下、Binarity Bridge社)は、日本全国における<紙>ドローンのワークショップの実施を目指し、ドローンスクール・プログラミング教室・美術教室などを対象としたパートナーおよびアンバサダーを募る「クラフトドローンコミュニティー」を開始した。
人が巡回する時代から「ドローン×AI」の時代へ。日本ドローンビジネスサポート協会、ドローン自動監視サービス開始
一般社団法人日本ドローンビジネスサポート協会(所在地:岡山県、代表理事:森本宏治)(以下、日本ドローンビジネスサポート協会)は、DJI Dock3およびDJI FlightHub 2を活用した「ドローン自動監視サービス」を開始した。 本サービスは、太陽光発電施設における窃盗被害対策や、自治体向けの不法投棄監視など、広範囲の監視業務を無人化・自動化し、安心・安全な地域社会の実現へ貢献していくとしている。